Autosaving every 20 secondsBasic Setup
class DQN(nn.Module):
def __init__(self,n_observations,n_actions):
"""
Input
n_observations : int
length of observation vector, the number of observed values
n_action : int
the number of actions which are possible to take in that state
"""
super().__init__()
self.layer1 = nn.Linear(n_observations,128)
self.relu = nn.ReLU()
self.layer2 = nn.Linear(128,64)
#relu
self.layer3 = nn.Linear(64,32)
#relu
self.layer4 = nn.Linear(32,16)
#relu
self.layer5 = nn.Linear(16,n_actions)
def forward(self,x):
"""
Input : tensor
4-dimensional observation vector
output : tensor
2-dimensional Q_values
"""
out =self.relu(self.layer1(x)) #l1_out
out = self.relu(self.layer2(out)) #l2_out
out = self.relu(self.layer3(out)) #l3_out
out = self.relu(self.layer4(out))
out = self.layer5(out)
return out
#_ob = torch.tensor([1.2,1.5,2.9,3.88])
#net(_ob)GAMMA = 0.99
BATCH_SIZE = 128
ϵ_START = 1
ϵ_END = 0.005
ϵ_DECAY = 0.001
TAU = 0.005
steps_done = 0
def select_action(state):
global steps_done
sample = random.random()
eps_threshold = ϵ_END + (ϵ_START - ϵ_END) * math.exp(-1 * steps_done / ϵ_DECAY)
#1. ϵ의 upper bound, lower bound를 부여
#2. EPS_DECAY의 비율만큼 서서히 감쇄
#※ ϵ_DECAY 비율에 의해서 ϵ이 너무 빨리 떨어져서 exploration이 조기에 종료될 수 있음.
steps_done += 1
if sample > eps_threshold:
"""
1-ϵ확률로 greedy하게
"""
with torch.no_grad():
return policy_net(state).max(1)[1].view(1,1)
#max(1) : dimension을 반영하여 최댓값을 알려줌, 최댓값(value)와 위치(index)를 포함
#max(1)[1] : index만 가져옴
#max(1)[1].view(1,1) : 차원변환
elif sample <= eps_threshold:
"""
ϵ의 확률로 random action
"""
return torch.tensor([[env.action_space.sample()]],device=device, dtype = torch.long)
#exploration
if steps_done % 50 == 0:
print(steps_done,epsilon_threshold)
episode_durations = []
def plot_durations(show_result=False):
plt.figure(1)
durations_t = torch.tensor(episode_durations, dtype=torch.float)
if show_result:
plt.title('Result')
else:
plt.clf()
plt.title('Training...')
plt.xlabel('Episode')
plt.ylabel('Duration')
plt.plot(durations_t.numpy())
# 100개의 에피소드 평균을 가져 와서 도표 그리기
if len(durations_t) >= 100:
means = durations_t.unfold(0, 100, 1).mean(1).view(-1)
means = torch.cat((torch.zeros(99), means))
plt.plot(means.numpy())
plt.pause(0.001) # 도표가 업데이트되도록 잠시 멈춤
if is_ipython:
if not show_result:
display.display(plt.gcf())
display.clear_output(wait=True)
else:
display.display(plt.gcf())\begin{case} L(i) = r + {a’} Q(S_{t+1},a’;^-) - Q(S_{t},A_t;) $$ hi \end{d}{case}
def optimize_model():
if len(memory) < BATCH_SIZE:
"""
buffer에 있는 transition이 BATCH_SIZE보다 적으면 학습 X.
"""
return
transitions = memory.sample(BATCH_SIZE)
batch = Transition(*zip(*transitions))
state_batch = torch.cat(batch.state,axis=0)
action_batch = torch.cat(batch.action,axis=0)
reward_batch = torch.cat(batch.reward)
#현재 Q값 계산
Q = policy_net(state_batch).gather(1,action_batch)
#Q-target 계산
non_final_mask = torch.tensor(tuple(map(lambda s : s is not None,batch.next_state)),device=device,dtype=torch.bool)
non_final_next_states = torch.cat([s for s in batch.next_state if s is not None],axis=0).to(device).type(torch.float32)
max_q = torch.zeros(BATCH_SIZE,device=device)
with torch.no_grad():
max_q[non_final_mask] = target_net(non_final_next_states).max(dim=1).values #max_q
Q_targets = (max_q * GAMMA) + reward_batch
loss = criterion(Q,Q_targets.unsqueeze(1))
loss.backward()
torch.nn.utils.clip_grad_value_(policy_net.parameters(),100)
optimizer.step()
optimizer.zero_grad()
optimize_model()for i_episode in range(5000):
s1 = torch.tensor(env.reset()[0],device=device,dtype = torch.float32).unsqueeze(0) #전처리는 없음
state = s1
for t in count(): #count(),
action = select_action(state)
observation,reward,terminated,truncated,_ = env.step(action.item())
reward = torch.tensor(reward,device=device,dtype=torch.float32).view(1)
done = terminated or truncated
#terminal state에 도달하거나 timelimit따위로 episoder가 끝날때 done = True
if terminated:
next_state = None
else:
next_state = torch.tensor(observation,dtype=torch.float32,device=device).unsqueeze(0)
#메모리에 변이 저장
#print(next_state)
"""
next_state = None,reward = 1 if terminated == True
next_state = arbitary,reward = 1 o.w
"""
memory.push(state,action,next_state,reward)
optimize_model()
#다음 상태로 이동
state = next_state
if done:
episode_durations.append(t + 1)
plot_durations()
break
if i_episode % 50 == 0:
target_net.load_state_dict(policy_net.state_dict())
print('Complete')
plot_durations(show_result=True)
plt.ioff()
plt.show()Complete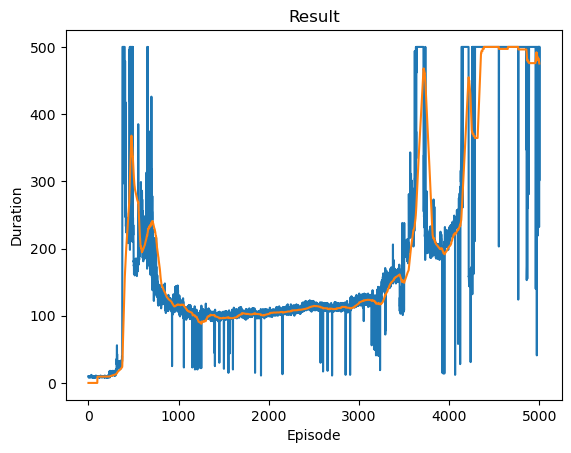
<Figure size 640x480 with 0 Axes><Figure size 640x480 with 0 Axes>